Tutorial: Puntenwolken filteren
2. Bekijk de statistieken van de point cloud-attributen
Laten we eerst controleren welke attributen beschikbaar zijn die we kunnen gebruiken om de punten in de point cloud-laag te filteren.
1. Klik in het Lagen-paneel met de rechtermuisknop op de point cloud-laag en kies Eigenschappen... in het contextmenu.
2. Klik in het Laageigenschappen dialoogvenster op de Statistieken tab.
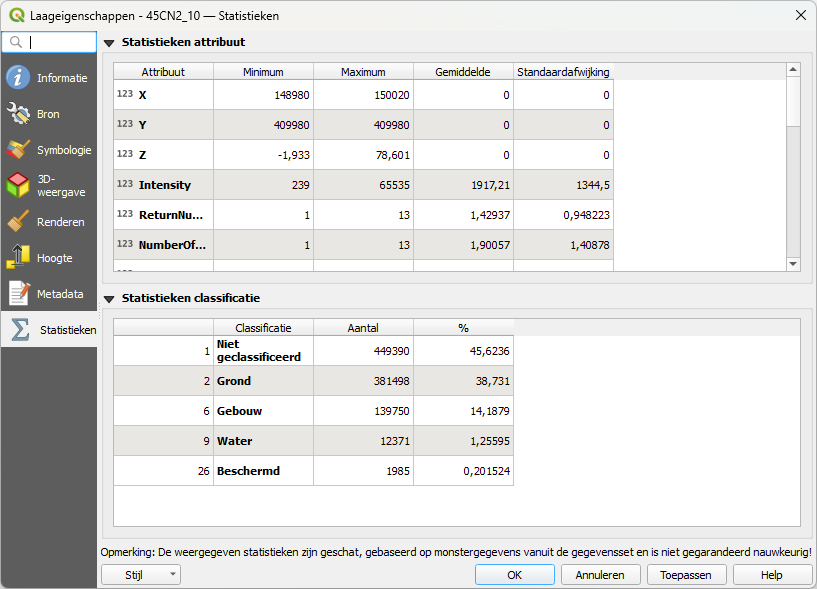
In bovenste tabel kan je de attributen en hun statistieken zien (minimum, maximum, gemiddelde, standaardafwijking). In de onderste tabel kan je de statistieken voor het classificatieattribuut zien. De kolom Aantal toont het aantal punten in de klasse en de kolom % toont het percentage punten met die klasse.
| Atrribuut | Beschrijving |
|---|---|
| x, y, z | Lokatieinformatie |
| GpsTime |
Het tijdstip waarop de laserpuls werd geregistreerd |
| Intensity |
De sterkte van de teruggekeerde laserpuls |
| ReturnNumber | De volgorde waarin de laserpuls werd teruggekaatst |
| NumberOfReturns |
Het totale aantal terugkaatsingen voor een gegeven laserpuls |
| Classification |
Een code die het type object definieert dat de laserpuls heeft gereflecteerd |
| ScanAngleRank of ScanAngle |
De hoek waaronder de laserpuls werd uitgezonden vanaf de sensor |
| RGB en Infrared | Kleurinformatie van een punt |
| ScanDirectionFlag | De richting waarin de scanner bewoog toen de puls werd uitgezonden |
| EdgeOfFlightLine | Een teken die aangeeft of het punt zich aan de rand van een vluchtlijn bevindt |
| UserData | Gebruikersgedefinieerde gegevens |
| PointSourceID | Een ID voor de bron van de puntgegevens |
| Amplitude | Sterkte van de gereflecteerde puls |
| Reflectance | Hoeveelheid laserlicht dat door het doelobject wordt teruggekaatst naar de sensor |
| ScannerChannel | Kanaalnummer van een LiDAR scanner |
We kunnen deze attributen gebruiken voor het visualiseren van point cloud-gegevens.
Je hebt in de vorige tutorial gezien dat er veel nuttige informatie in de attributen zit door ze te visualiseren in 2D en 3D. In de volgende hoofdstukken zullen we de attributen gebruiken om de point cloud-gegevens te filteren.