Tutoriel : Préparation des données à partir d'une carte papier
7. Ajout des points d'ancrage
Afin de lier les coordonnées du fichier aux coordonnées du monde réel, nous devons indiquer les points d'ancrage avec des coordonnées connues. Nous pouvons dériver ces coordonnées de différentes manières:
- Le moyen le plus simple consiste à utiliser la grille de coordonnées sur la carte numérisée si elle est disponible et si elle se trouve dans une projection connue. Nous cliquons sur un nœud dans la grille et saisissons les coordonnées X et Y correspondantes dans la boîte de dialogue.
- En utilisant une carte de référence dans le canevas de carte QGIS qui est déjà géoréférencée. De cette façon, nous pouvons obtenir les bonnes coordonnées en
cliquant sur la carte de référence.
- En utilisant des points d'ancrage mesurés sur le terrain à l'aide d'un GPS
Ici,
nous utiliserons la grille de coordonnées imprimée sur la carte.
1. Zoomez sur le nœud dont les coordonnées sont 581000 Est et 4885000 Nord. Lisez les coordonnées sur le côté de la carte, déterminez ce qui est x et ce qui est y.
2. Cliquez sur le bouton Ajouter un point pour insérer un point d'ancrage.
pour insérer un point d'ancrage.
3. Entrez les coordonnées de la carte dans la fenêtre pop-up :
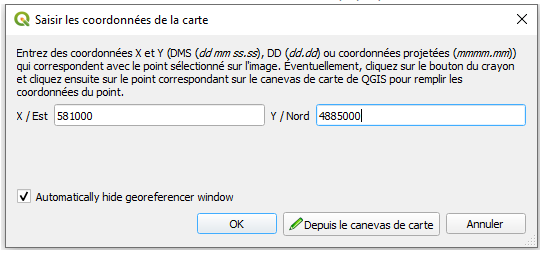
4. Cliquez sur OK.
Maintenant, votre écran devrait ressembler à la capture d'écran ci-dessous :
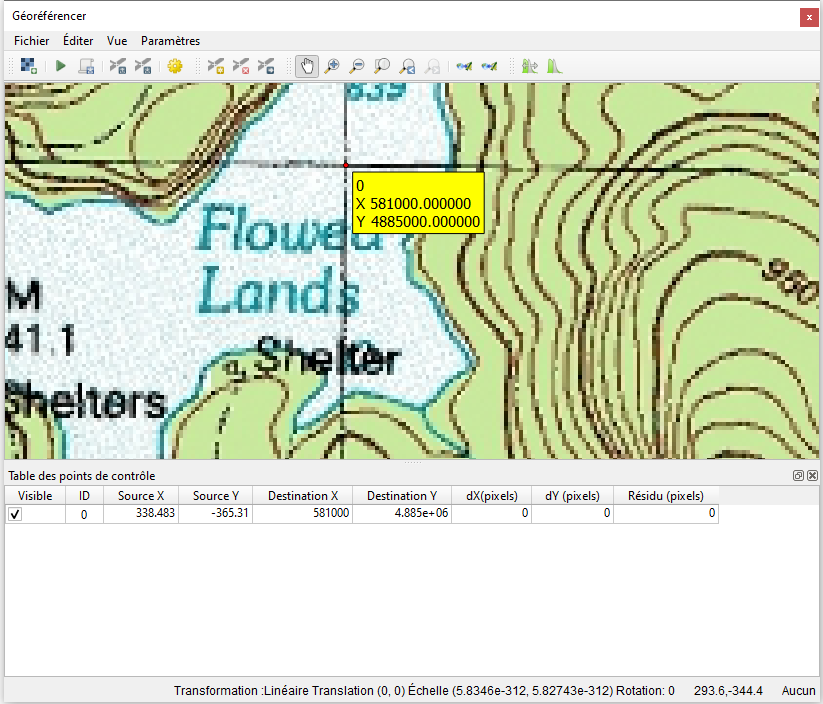
Le
point rouge est l'emplacement que vous avez référencé. Dans le tableau sous la
carte, vous pouvez voir les coordonnées Source X et Source Y. Ce sont les
coordonnées du fichier non référencé. Leurs valeurs dépendent du pixel sur
lequel vous avez cliqué pour placer le point de calage. Il peut donc différer de la capture
d'écran ci-dessus. Dest. X et Dest. Y indique les coordonnées du monde réel que
vous avez liées à cet emplacement. Les autres champs du tableau concernent
l'exactitude estimée et seront remplis après l'ajout de points supplémentaires.
5. Choisissons
un deuxième point d'ancrage dans le coin supérieur droit de la carte et procédons de la
même manière qu'avec le premier point. Votre écran devrait ressembler à la capture d'écran ci-dessous:
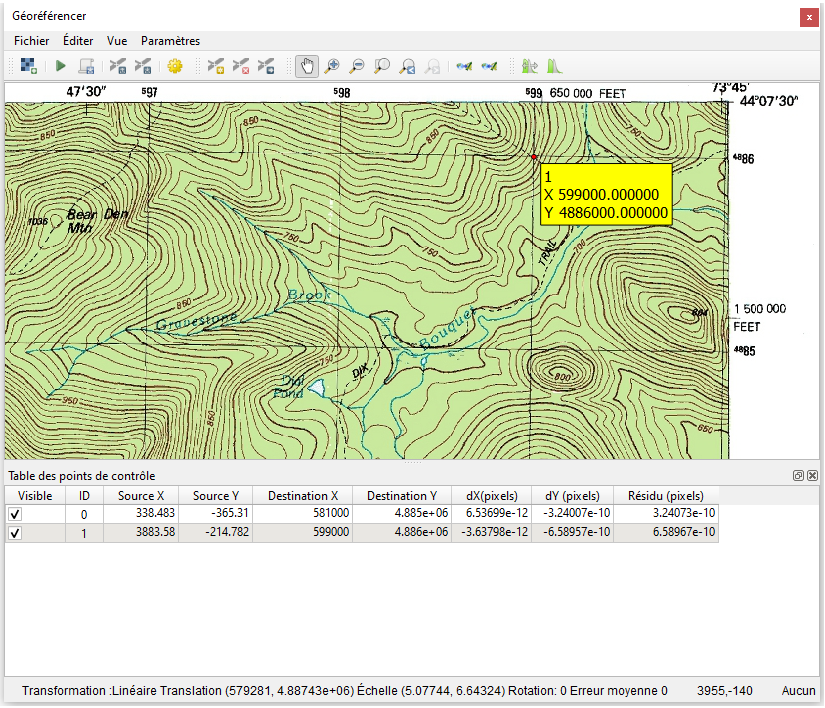
Vous
pouvez voir que certaines statistiques d'erreur ont été calculées. Avec
seulement deux points, cela n'a pas beaucoup de sens. La nombre minimale des points d'ancrage pour une transformation linéaire doit être trois. Avec plus de points bien répartis sur la carte, la transformation sera plus précise.
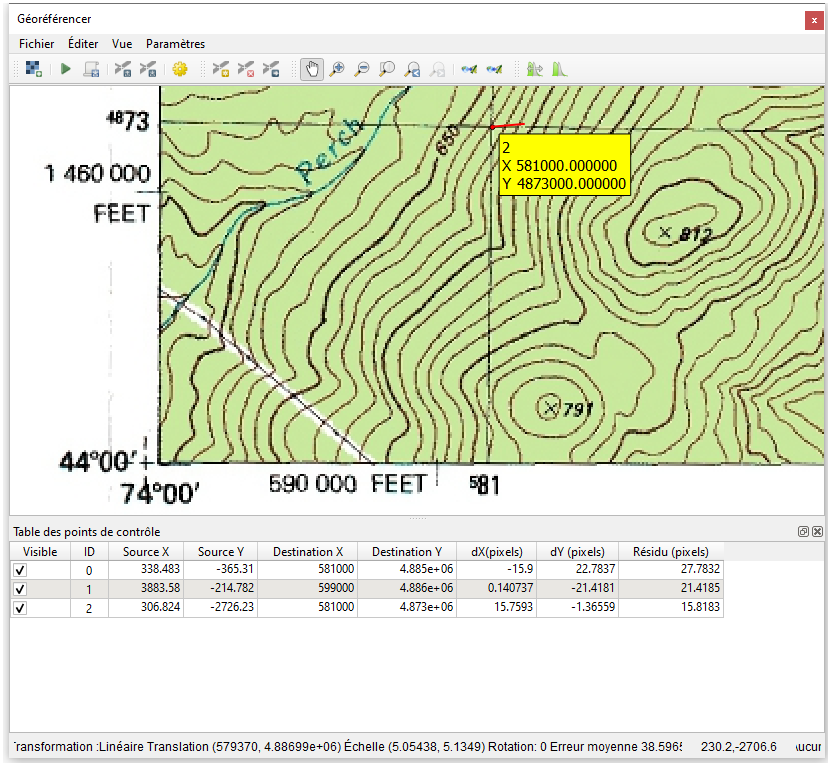
6. Ajoutez
de la même manière un point de calage dans le coin inférieur gauche et le coin inférieur
droit de la carte. Si vous faites une erreur, vous pouvez supprimer le point en
utilisant le bouton Supprimer un point .
.
Votre écran devrait ressembler à la prise d'écran ci-dessous: